Віддаленому е р, прилад для вимірювання відстаней. Широко застосовується в інженерній геодезії (при будівництві шляхів сполучення, гідротехнічних споруд, ліній електропередач і т. Д.), При топографічній зйомці, у військовій справі (головним чином для визначення відстаней до цілей), в навігації, в астрономічних дослідженнях, у фотографії.
За принципом дії розрізняють Д. геометричних і фізичних типів. Вимірювання відстаней Д. першого типу засноване на визначенні висоти h рівнобедреного трикутника ABC (рис. 1), наприклад по відомій стороні AB = l (базі) і протилежного гострого кута b (т. Н. Параллактическому кутку). При малих кутах b (виражених в радіанах) h = l / b. Одна з величин, l або b, зазвичай є постійною, а інша - змінною (вимірюваної). За цією ознакою розрізняють Д. з постійним кутом і Д. з постійною базою.
Нитяний Д. з постійним кутом є зорову трубу з двома паралельними нитками в полі зору. Базою Д. служить переносна рейка з рівновіддаленими поділами. Вимірюється Д. відстань до бази пропорційно числу поділок рейки, видимих в зорову трубу між нитками. Нитяним Д. забезпечені багато геодезичні інструменти (теодоліти, нівеліри і ін.). Відносна похибка нитяного Д. ~ 0,3-1%.
Більш складні оптичні Д. геометричного типу мають власну постійну базу. Вони поділяються на дві групи: монокулярні і бінокулярні (стереоскопічні).
Монокулярний Д. (рис. 2) влаштований т. О., Що зображення об'єкта (цілі) видно в окулярі Ок складеним з двох половин, розділених горизонтальною лінією; різні половини зображення побудовані променями, що пройшли різні оптичні системи Д. (O1 і O2).
У разі дуже віддаленого об'єкта, коли потрапляють в Д. промені A1 і A2 практично паралельні, обидві половини зображення знаходяться в одному місці на горизонтальній лінії розділу і утворюють цілісне зображення. З наближенням об'єкта до Д. паралельність променів A1 і a2 порушується і половинки зображення розходяться уздовж лінії розділу. Для вимірювання відстані до об'єкта потрібно звести зміщені половинки зображення за допомогою оптичного компенсатора, розташованого в одній з оптичних систем. Результат вимірювання прочитується на спеціальній шкалі. Похибка монокулярних Д. подвійного зображення ~ 0,1% при довжинах до 1 км.
Монокулярні Д. з базою 3-10 см широко застосовують в якості фотографічних Д. Зазвичай фотографічні Д. об'єднують в одну оптичну систему з видошукачем фото- або кіноапарата. Промені світла від об'єкта зйомки проходять в фотографічний Д. (рис. 3) через дві різні оптичні системи (основну і додаткову). Побудовані цими системами зображення видно в окулярі Д. несовмещённимі. Для наведення об'єктива на різкість і отримання чіткого фотознімку обидва зображення поєднують в одне переміщенням оптичного компенсатора, пов'язаного з механізмом фокусування об'єктиву фотоапарата.
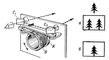
Стереоскопічний Д. з постійною базою (рис. 4) являє собою подвійну зорову трубу з двома окулярами. Дія Д. засновано на стереоскопічному ефекті: що розглядаються окремо кожним оком зображення зливаються в одне об'ємне, в якому відчувається різниця в розташуванні предметів по глибині. Для визначення відстані до об'єкта (цілі) зображення об'єкта поєднують із зображенням спеціальної мітки ( «марки»), що знаходиться в фокальній площині Д. Об'єкт і «марка» повинні як би знаходитися на однаковій відстані від спостерігача. Зсув оптичного компенсатора, необхідну для поєднання «марки» і мети, пропорційно визначається віддалі. Точність стереоскопічного Д., особливо з базою в кілька м, на порядок вище точності монокулярних Д.
Принцип дії Д. фізичного типу - світлових, радіо і акустичних - полягає у вимірюванні часу, який витрачає посланий Д. сигнал для проходження відстані до об'єкту і назад. Швидкість поширення сигналу (швидкість світла з або звуку v) вважається відомою.
Світлодалеміри, або електрооптичні Д., діляться на імпульсні і фазові. Д. першого виду безпосередньо вимірюють проміжок часу t, за який світловий імпульс проходить подвійну відстань до 2 L, так що L = ct / 2 + k, де k - постійна Д.
У фазових Д. використовується безперервний світловий потік з штучно створюваними високочастотними змінами (модуляцією) його інтенсивності. При плавній зміні частоти модуляції змінюється різниця фаз модуляції у посилається і відбитого потоків світла. В результаті в Д. спостерігаються максимуми і мінімуми інтенсивності світла, по числу яких визначають час t t, а потім L (докладніше див. електрооптичний далекомір ). За величиною і точності светодальномери ділять на великі, середні та малі (топографічні), що дозволяють вимірювати відстані 20-25 км з точністю 1 400 000, 5-15 км з точністю 1: 300 000, а 5-6 км з точністю 1: 10 000 - 1: 100 000. На «Місяцеході-1» був встановлений відбивач лазерного светодальномера, призначений для вимірювання відстані до Місяця (близько 385 000 км) з точністю кілька м.
У радіодалекоміри зазвичай використовують електромагнітні хвилі сантиметрового і міліметрового діапазонів. Розрізняють імпульсні радіодалекоміри і Д. з безперервним випромінюванням (докладніше див. Радіодалекомір ).
У зв'язку з сильним поглинанням і розсіюванням світла і радіохвиль конденсованими середовищами (рідинами і твердими тілами) світло- і радіодалекоміри застосовуються тільки в атмосферних умовах і в космічному просторі. Для визначення відстаней в товщі вод океанів і морів використовують акустичні Д., оскільки поглинання водою ультразвуку незначно (див. ехолот , гідролокатор ).
Теоретично радіус дії Д. фізичного типу визначається потужністю посилаються сигналів і чутливістю приймального пристрою Д., що фіксує відбитий сигнал. Можливості Д. ілюструє наступний приклад: під час польоту міжпланетної станції «Венера-7» відстань між Землею і Венерою (понад 60 млн. Км) вимірювалося з точністю до 1 км.
Літ .: Короткий топографо-геодезичний словник-довідник, М., 1968; Кондрашков А. В., Електрооптичні далекоміри, М., 1959; Проворов К. Л., Радіогеодезія, М., 1965; Бородулін Г. І., Огляд сучасної светодальномерной апаратури, «Геодезія та картографія», 1970, №7.
Ю. Н. Дрожжин-Лабінський

Мал. 4. Зовнішній вигляд (а) і схема пристрою (б) стереоскопічного далекоміра: A1, A2 - вікна; B1, B2 - відбивачі (призми); O1, O2 - оптичні системи, що будують зображення; К - компенсатор для поєднання «марки» із зображенням; C1 і C2 - призми; Ок - окуляр; в - поле зору з «марками».
Мал. 3. Фотографічний далекомір: C1 і C2 - призми, В - об'єктив фотоапарата, К - важіль; до фокусування очей бачить у видошукачі два зображення (а), після фокусування - повороту об'єктива і зміщення важеля з призмою - одне (б).

Мал. 1. Схема, яка пояснює принцип дії далекоміра геометричного типу: AB - база, b - паралактичний кут, h - вимірювана відстань.

Мал. 2. Пристрій монокулярного далекоміра: B1 і B2 - відбивачі, розташовані на кінцях бази; O1 і O2 - оптичні системи, що будують зображення; З - спеціальний відбивач (призма), який поєднує обидва зображення в загальній фокальній площині F, Ок - окуляр. У гуртках показано видиме в окуляр зображення до поєднання (а) і після поєднання (б).